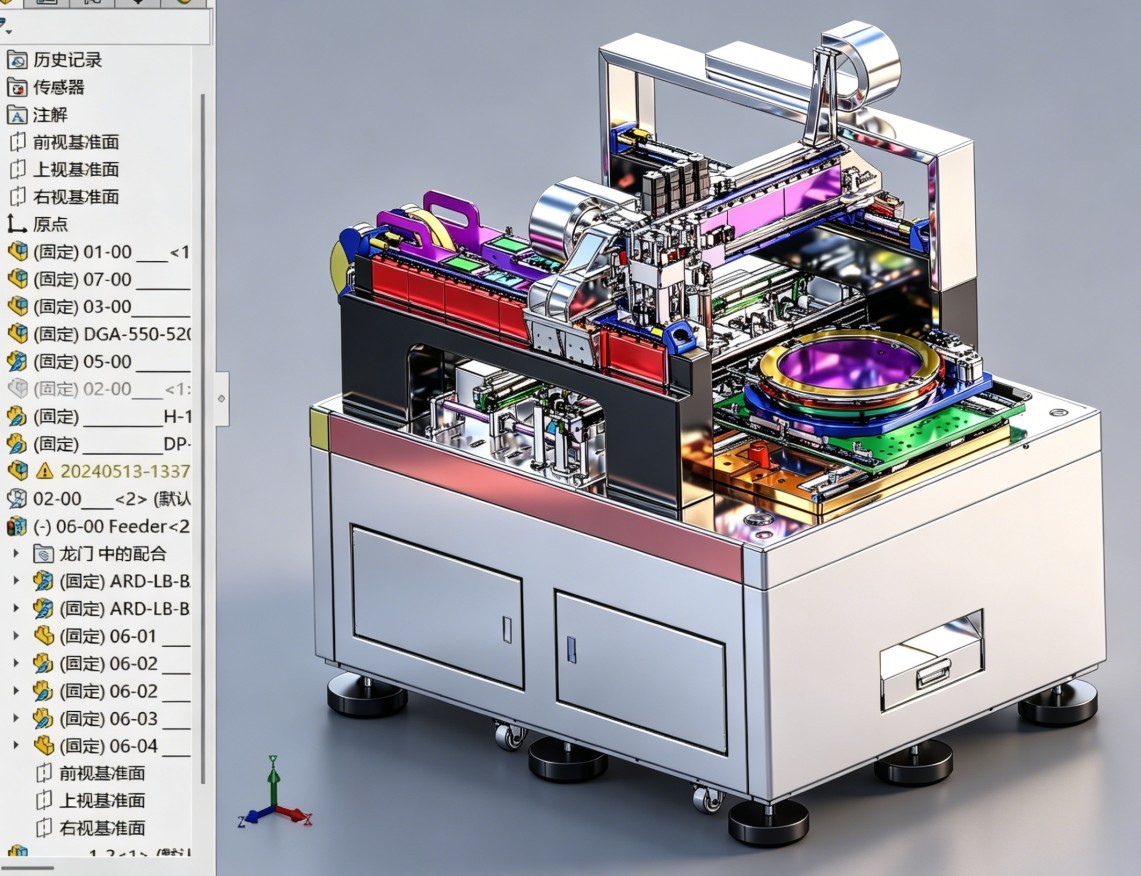
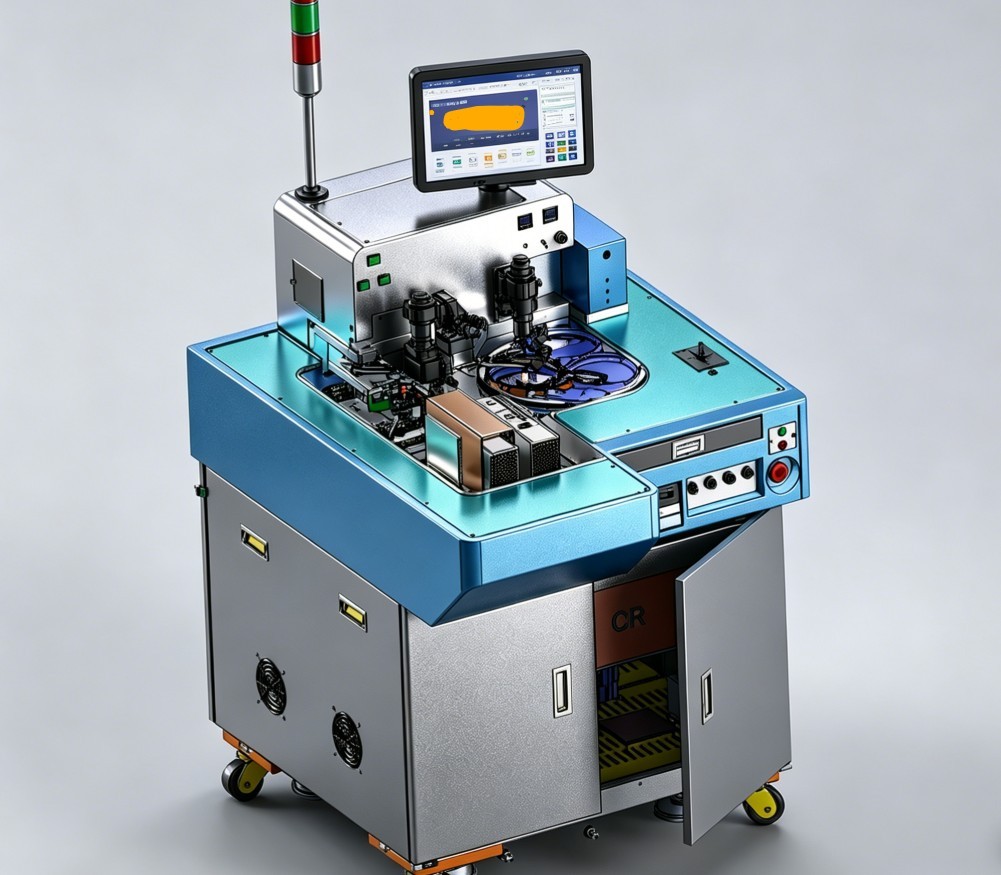
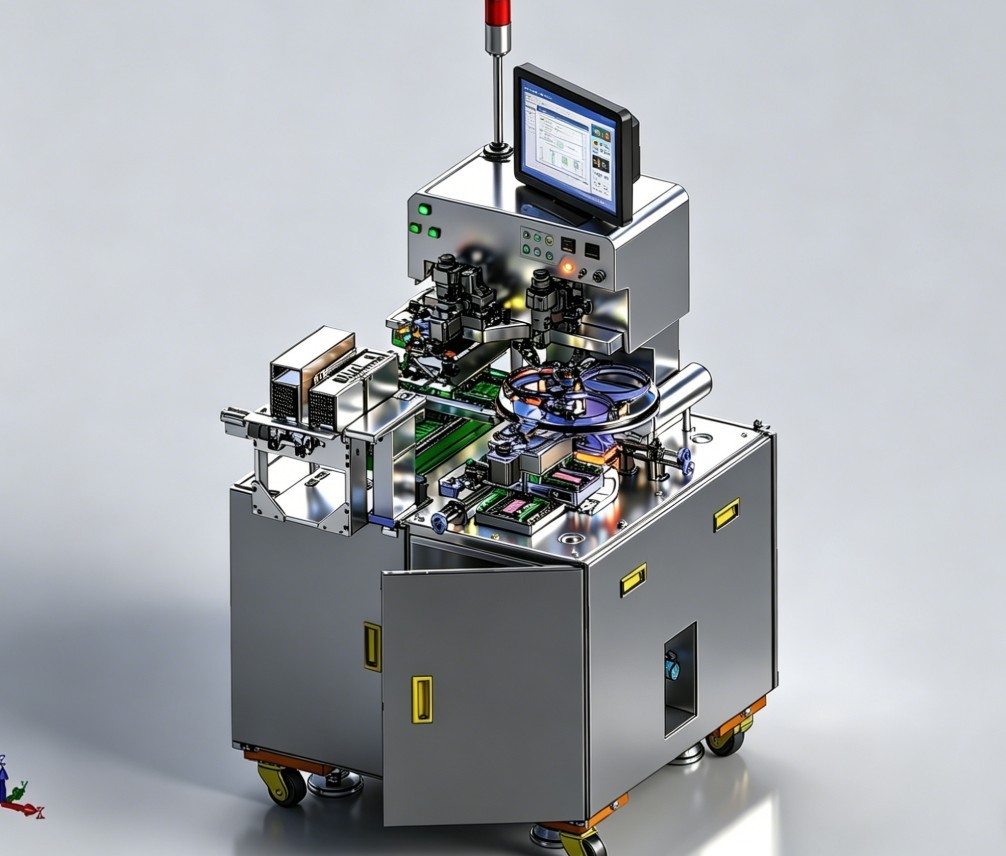
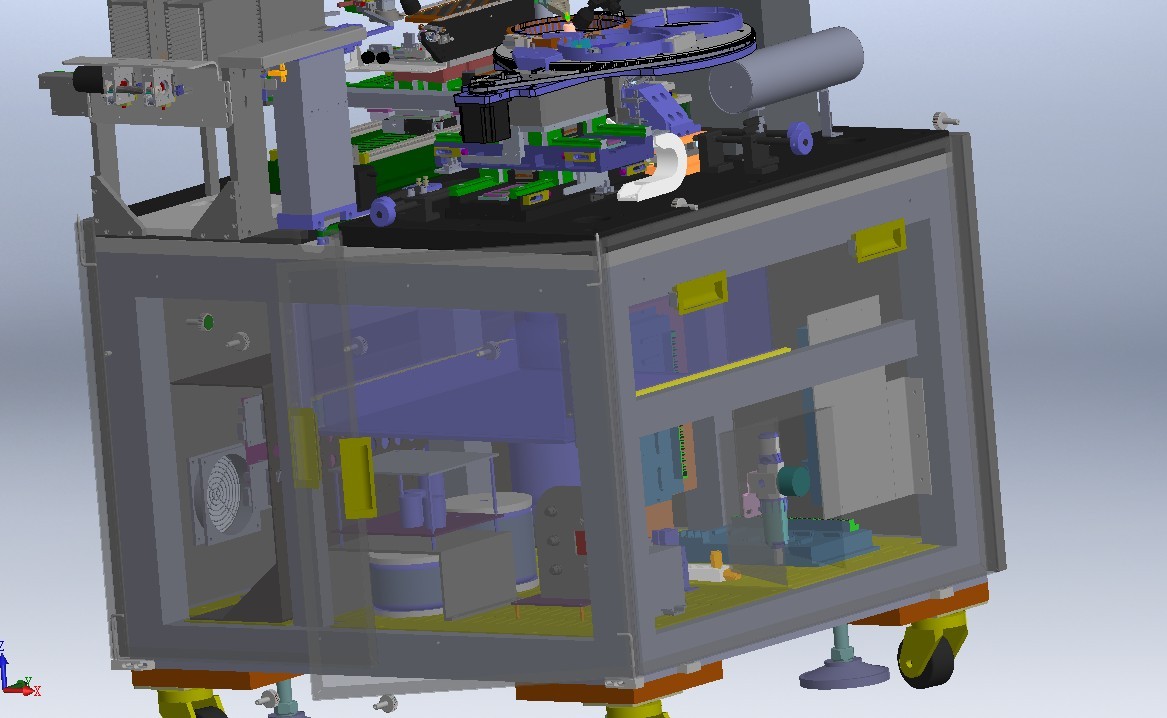
XT格式,半导体摆臂式固晶机,三个转盘可以切换晶圆盘!结构设计很经典!业界成熟机型!对于进入半导体行业的公司或个人都是一款十分有学习价值的图纸!
摆臂固晶机是半导体封装核心设备,用高速摆臂将芯片从晶圆吸取并精准贴装到基板 / 支架,主打高速、高精度、高稳定性,广泛用于 LED、Mini LED、IC 与功率器件封装。
核心是摆臂旋转 + 上下直线运动,配合视觉定位与压力控制,完成 “吸晶→移晶→固晶” 循环。
上料 / 点胶:基板自动上料,点胶臂在固晶位点涂银胶 / 绝缘胶。
晶圆供料:扩晶台撑开晶圆膜,顶针顶出芯片,便于吸嘴拾取。
视觉定位:CCD 飞拍芯片与基板位置,计算偏差并实时补偿。
摆臂取晶:摆臂快速摆动至晶圆位,吸嘴真空吸附芯片,顶针同步回缩。
摆臂固晶:摆臂旋转至基板位,音圈电机驱动吸嘴下压,精准贴装芯片。
检测 / 复位:真空检测防漏吸,摆臂返回原点,进入下一循环。
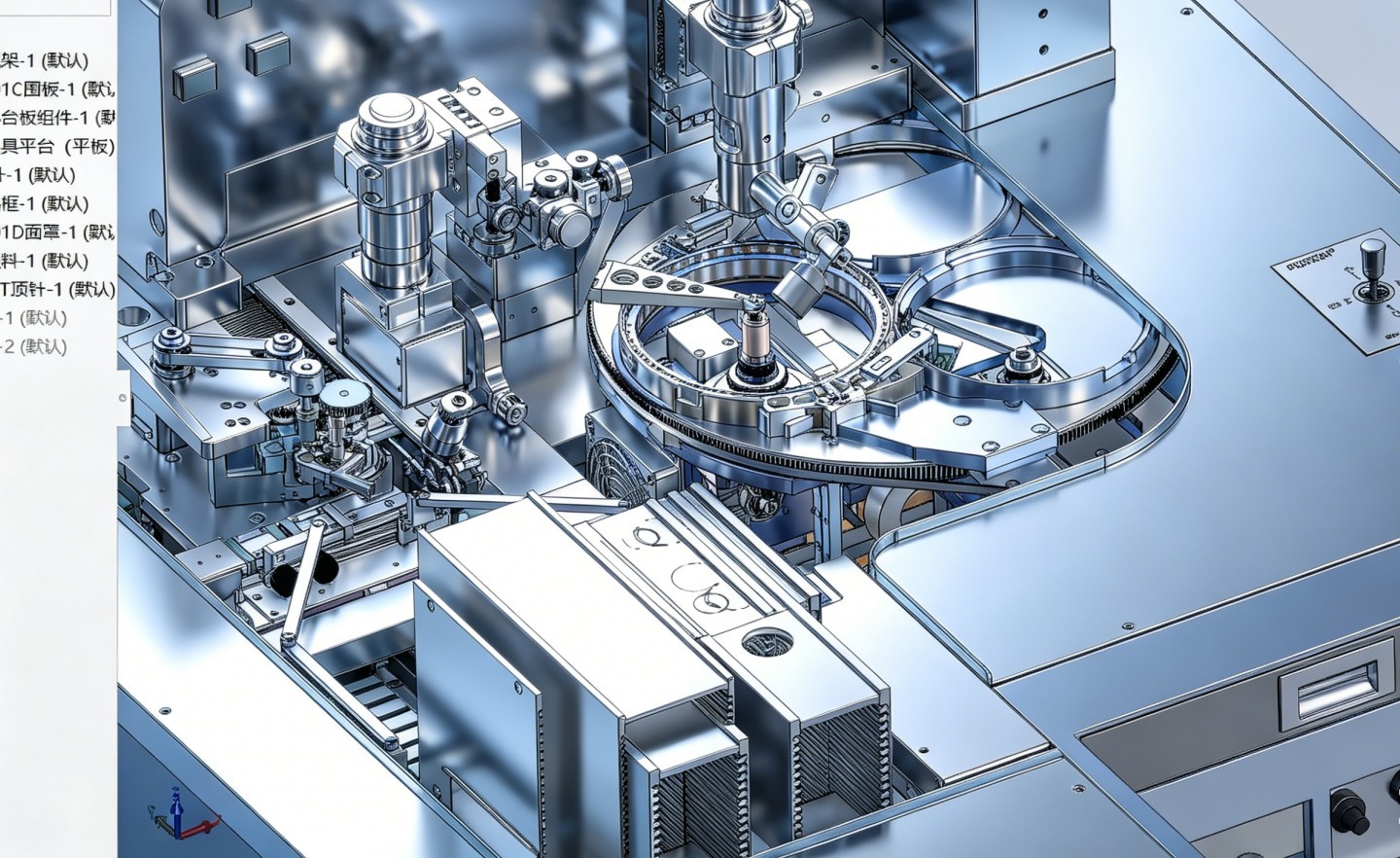
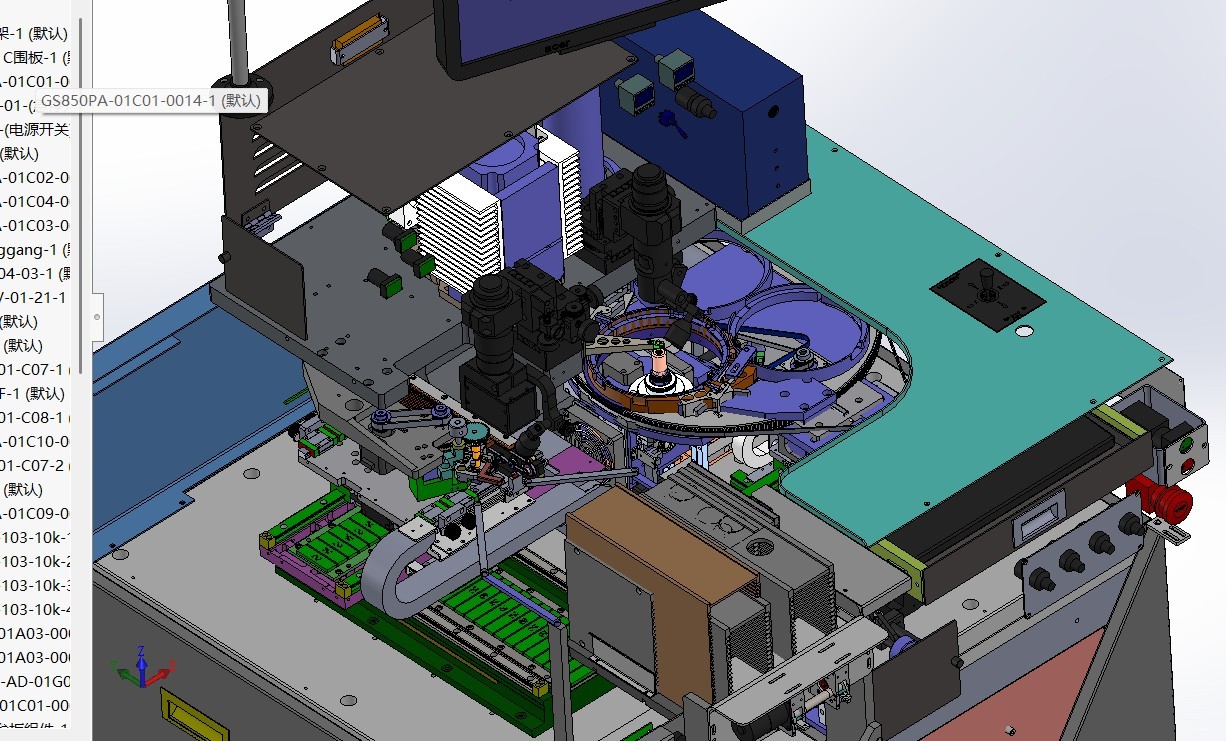
摆臂模组(核心)
结构:单臂 / 双臂 / 三臂,伺服 + 音圈电机驱动,360° 旋转,轻量化高强度材质(如碳纤维)。
性能:响应快(毫秒级)、振动小、重复定位精度高。
视觉系统:上下双 CCD,底部飞拍识别芯片极性 / 角度,精度可达 **±1μm**,支持 AI 视觉补偿。
晶圆 / 顶针模组:自动换晶环(5 秒级)、扩膜、XY 纠偏,顶针行程 / 压力可调。
点胶模组:单 / 双点胶臂,点胶精度 ±5μm,适配银胶、助焊剂等。
固晶平台:直线电机驱动,激光测高,压力闭环控制(5–500g)。
单摆臂:结构简单、成本低,适用于低精度 / 小批量场景(如直插 LED)。
双摆臂(主流):双臂交替作业,效率翻倍,产能30–60K/h,适配 Mini LED/IC。
三摆臂:一次定位贴 3 颗芯片,效率最高(UPH 60–90K),用于高端 COB / 车载显示。
LED 固晶机:2835/5050/0603 等,精度 ±20–25μm,产能 30–90K/h。
Mini LED 固晶机:精度 ±10–15μm,角度 ±1°,支持巨量转移,产能 50–100K/h。
IC / 功率器件固晶机:精度 ±3–10μm,支持共晶 / 蘸胶工艺,适配 2–12 寸晶圆。
固晶精度:位置 ±10–20μm(高端 ±3–5μm),角度 ±0.1°–±1°。
固晶速度:单臂 20–30K/h,双臂 40–60K/h,三臂 60–90K/h。
良率 / 稼动率:≥99.9%/≥98%。
芯片尺寸:0.2mm(Mini LED)–50mm(功率器件)。

| # | 文件名称 | 大小 |
|---|---|---|
| 1 |  摆臂固晶机/DIE BONDER.x_t
摆臂固晶机/DIE BONDER.x_t
|
89.17M |
| 2 |
摆臂固晶机/半导体设备图纸更多下载www.semimodel.com - 副本.pdf
|
290.75K |
| 3 |
摆臂固晶机
|
0B |