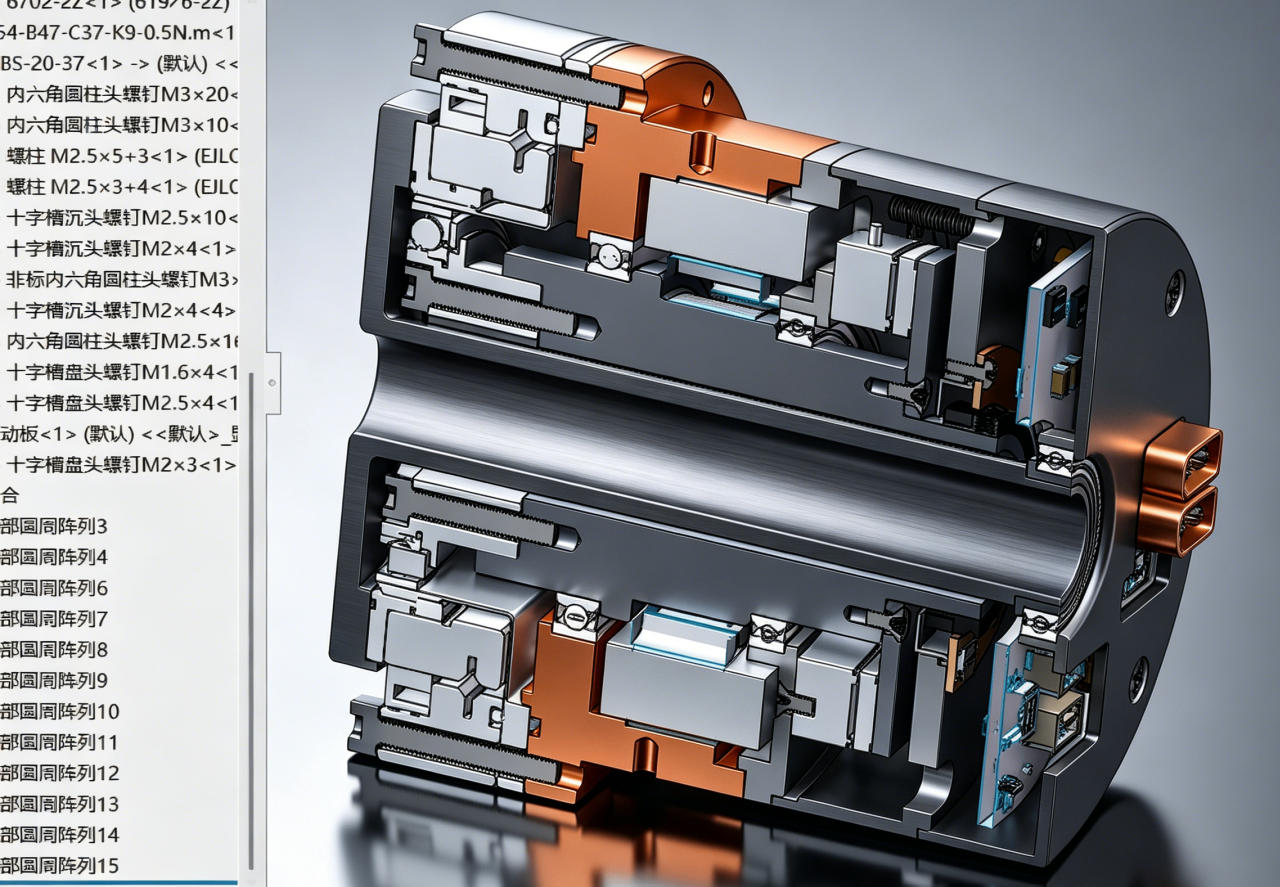
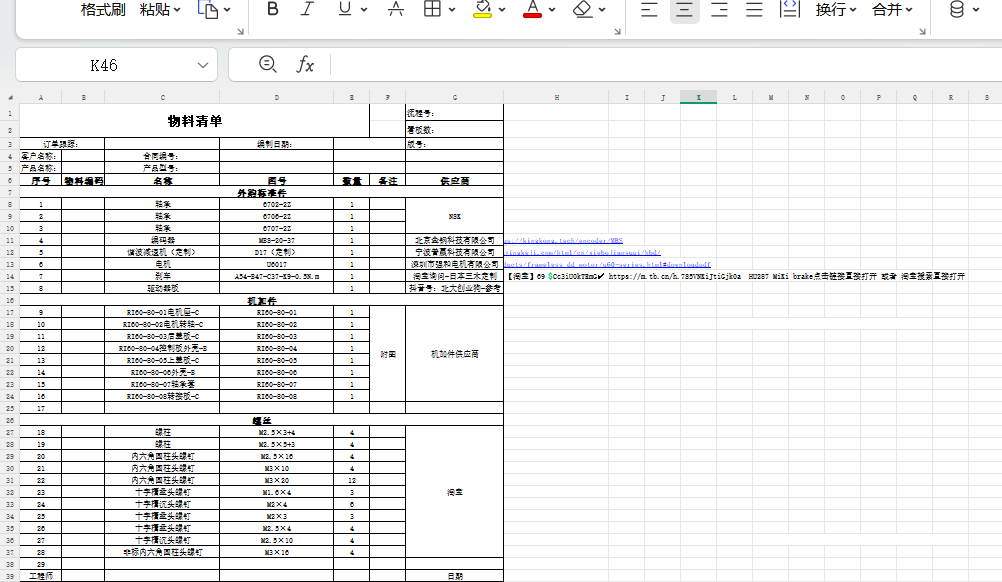
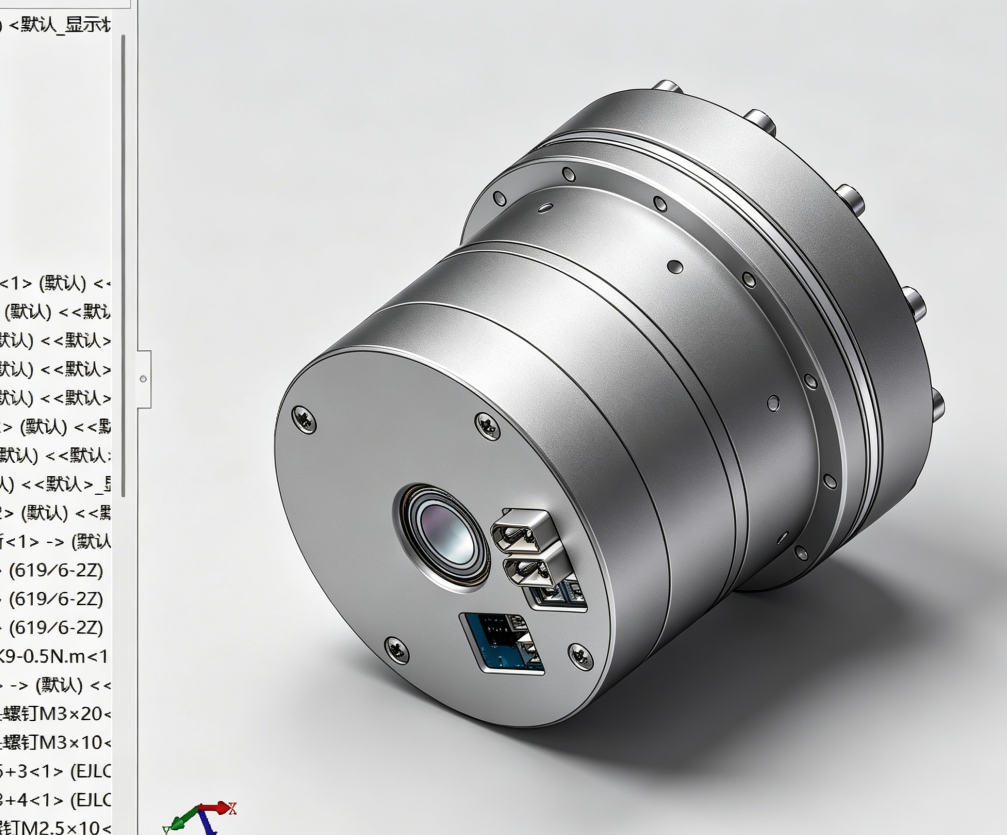
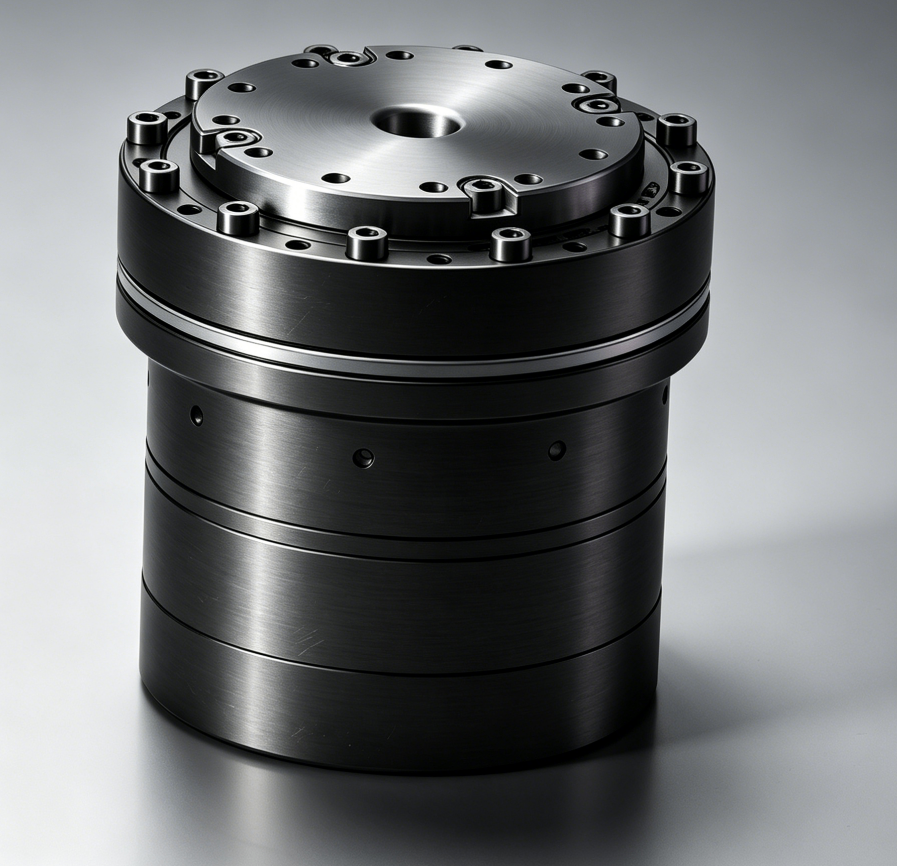
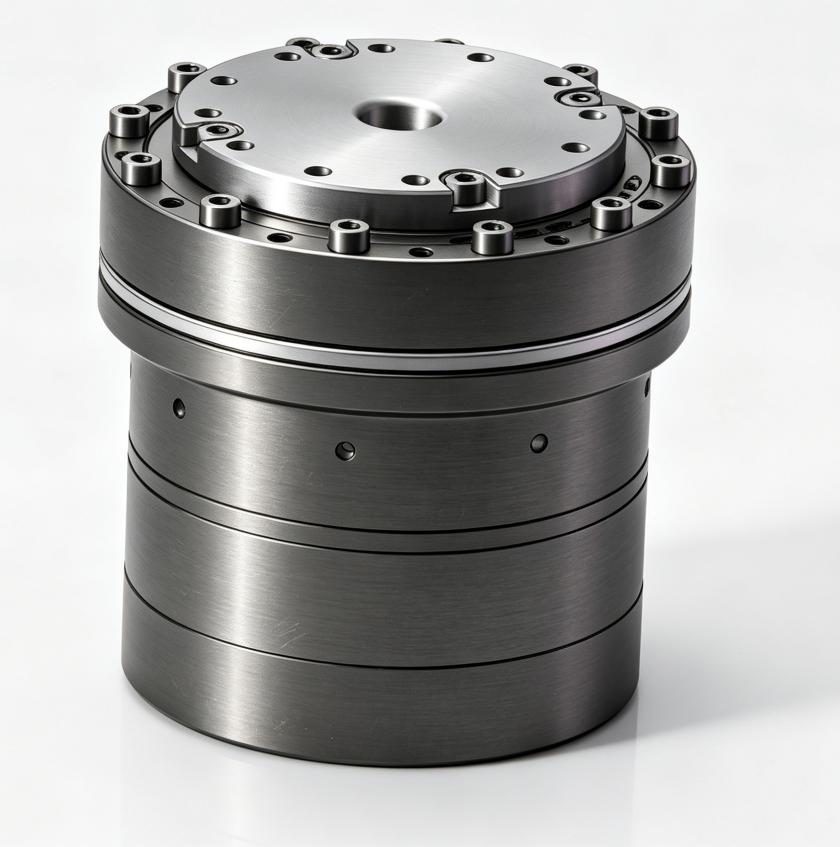
人形机器人关节模组,也叫一体化伺服关节、执行器关节,是人形机器人(双足、仿人手臂、外骨骼)的核心运动单元,是高度集成的模块化驱动部件。把电机、双级谐波减速器、双编码器、伺服驱动板、制动器、密封壳体、动力接口全部封装在圆筒机身内,无需外部搭配驱动,直接供电通讯即可输出扭矩,实现关节旋转运动。你图中这款属于大扭矩中空双驱关节,多用于髋部、肩部、膝关节等重载关节。
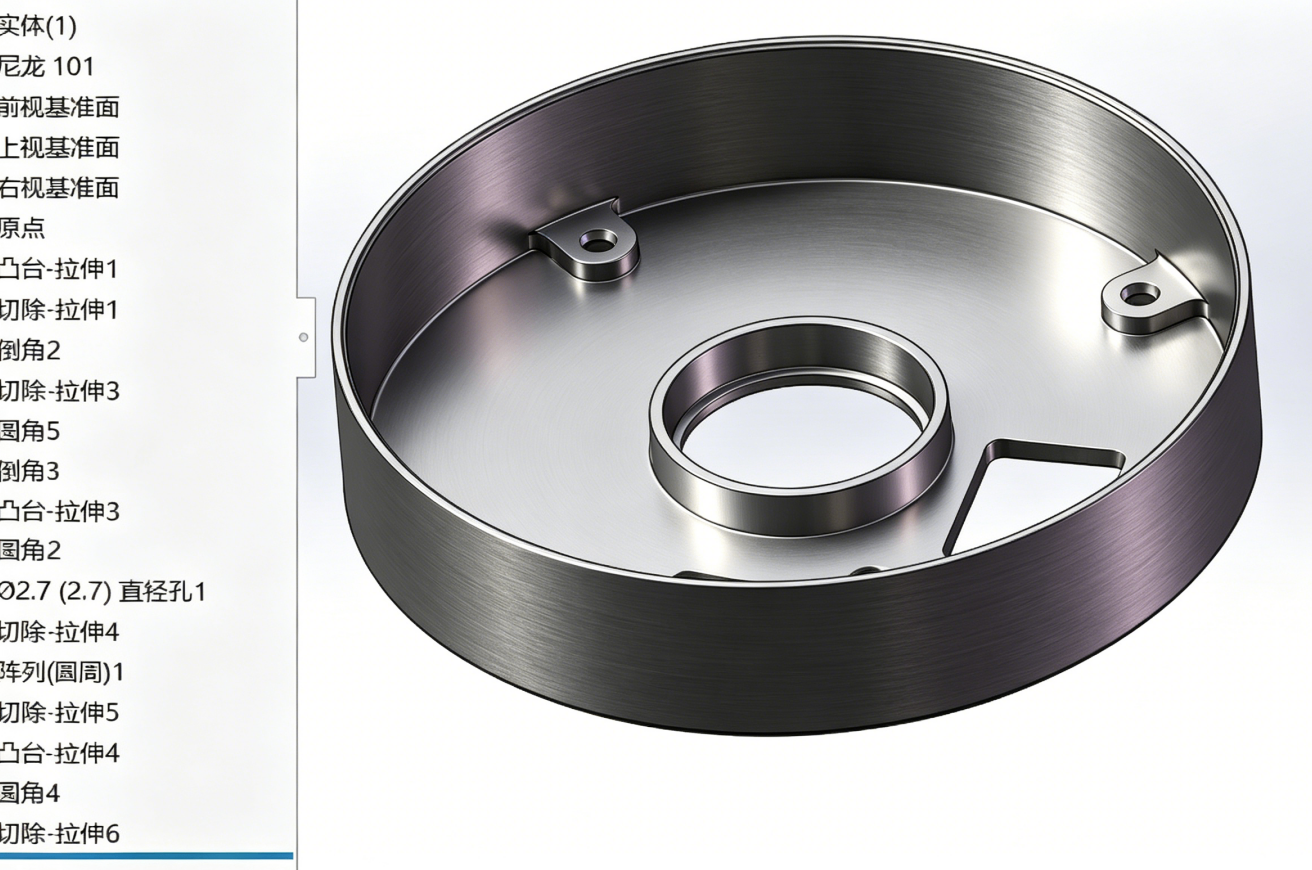
输出法兰盘:外圈螺纹孔用于连接机器人连杆、骨骼结构;中心中空通孔,用来穿线缆、液压 / 气管,实现整机内部走线,避免线材弯折磨损。
端面密封槽:内置 O 型圈,防尘防水,满足机器人落地、户外作业防护需求。
采用双谐波减速器对称布局(剖切图上下两组橙色谐波结构):
谐波减速器特点:体积小、减速比大、无背隙、定位精度极高,是人形机器人唯一适配减速器;
双谐波对称设计:抵消单侧径向应力,大幅提升关节径向刚度,负重、抗冲击能力更强,适合人形机器人站立、跳跃、负重动作。
内置两台扁平式无框直流力矩电机,同轴对称布置:
扁平空心结构,匹配中空走线;
高扭矩密度,低速大转矩输出,无需额外减速前置级。
输出端绝对值编码器:安装在输出法兰侧,实时检测关节实际转角,定位零位、绝对位置;
电机端增量编码器:检测电机转子转速、角度,形成双闭环控制;
双编码闭环:重复定位精度可达 ±0.01°,满足人形机器人平衡控制、精细操作需求。
模组尾部集成功率驱动板、通讯板:
功率 MOS 管驱动电机,支持大电流输出;
通讯接口:CAN/RS485/EtherCAT,多关节同步联动;
内置过流、过温、堵死保护算法;
尾部镀金大电流端子(图中金色插头):高压大电流供电,适配大功率重载关节。
集成断电刹车:断电瞬间锁死输出轴,机器人断电不会坍塌,保障安全,适用于腿部承重关节。
整机圆筒壳体采用不锈钢 / 航空铝,表面拉丝黑钛处理:
高刚性、抗碰撞;
多层分段密封结构,防尘防油污;
圆周预留安装工艺孔、定位销孔,方便整机装配。
上位控制器下发角度 / 扭矩指令,通过总线传输至关节内置驱动板;
驱动板输出三相电流驱动内置力矩电机旋转;
电机动力输入双谐波减速器,放大扭矩、降低转速;
双编码器实时采集电机转角与输出法兰实际角度,反馈给驱动板形成闭环调节;
驱动板实时调整电流,精准控制输出扭矩、转速、位置;
断电时内置抱闸锁死输出轴,维持关节姿态。

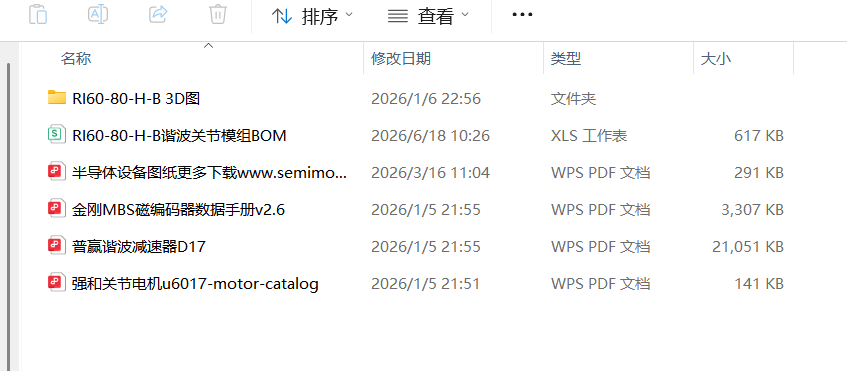
| # | 文件名称 | 大小 |
|---|---|---|
| 1 |  www.semimodel.com6017电机 -新.SLDPRT
www.semimodel.com6017电机 -新.SLDPRT
|
603.12K |
| 2 |
www.semimodel.com6702-2Z.sldprt
|
2.73M |
| 3 |
www.semimodel.com6706-2Z.sldprt
|
2.7M |
| 4 |
www.semimodel.com6707-2Z.sldprt
|
2.66M |
| 5 |
www.semimodel.comA54-B47-C37-K9-0.5N.m.SLDPRT
|
224.12K |
| 6 |
www.semimodel.comD17(定制).SLDPRT
|
11.29M |
| 7 |
www.semimodel.comMBS-20-37.SLDPRT
|
1.56M |
| 8 |
www.semimodel.comRI60-80-H-B.SLDASM
|
429.63M |
| 9 |
www.semimodel.com上盖板-C.SLDPRT
|
347.22K |
| 10 |
www.semimodel.com内六角圆柱头螺钉M2.5×16.sldprt
|
231.46K |
| 11 |
www.semimodel.com内六角圆柱头螺钉M3×10.sldprt
|
201.35K |
| 12 |
www.semimodel.com内六角圆柱头螺钉M3×20.sldprt
|
237K |
| 13 |
www.semimodel.com十字槽沉头螺钉M2.5×10.sldprt
|
259.9K |
| 14 |
www.semimodel.com十字槽沉头螺钉M2×4.sldprt
|
227.81K |
| 15 |
www.semimodel.com十字槽盘头螺钉M1.6×4.sldprt
|
286.84K |
| 16 |
www.semimodel.com十字槽盘头螺钉M2.5×4.sldprt
|
331.73K |
| 17 |
www.semimodel.com十字槽盘头螺钉M2×3.sldprt
|
281.47K |
| 18 |
www.semimodel.com后盖板-C.SLDPRT
|
349.08K |
| 19 |
www.semimodel.com外壳-B.SLDPRT
|
338.63K |
| 20 |
www.semimodel.com控制板外壳-B.SLDPRT
|
350.34K |
| 21 |
www.semimodel.com电机座-C.SLDPRT
|
414.74K |
| 22 |
www.semimodel.com电机转轴-C.SLDPRT
|
277.22K |
| 23 |
www.semimodel.com螺柱 M2.5×3+4.sldprt
|
198.28K |
| 24 |
www.semimodel.com螺柱 M2.5×5+3.sldprt
|
178.18K |
| 25 |
www.semimodel.com转接板-C.SLDPRT
|
194.65K |
| 26 |
www.semimodel.com轴承套.SLDPRT
|
104.09K |
| 27 |
www.semimodel.com非标内六角圆柱头螺钉M3×16.sldprt
|
231.19K |
| 28 |
www.semimodel.com驱动板.SLDPRT
|
17.73M |